Method Overview
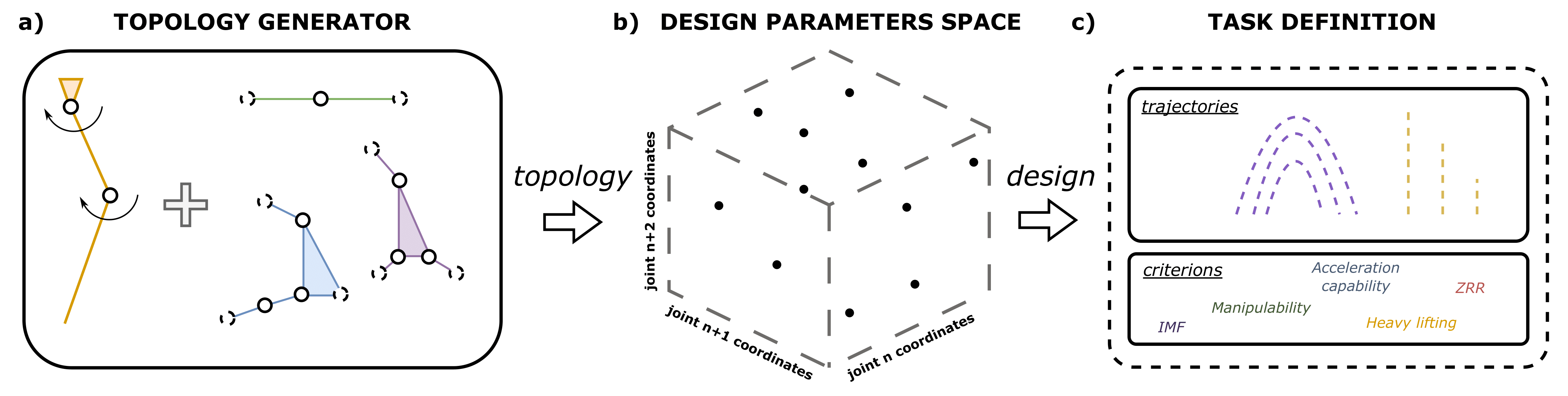
Our computational framework for optimizing topology and parameters of closed linkage mechanisms.
Our computational framework for optimizing topology and parameters of closed linkage mechanisms.
Legged robots require low-inertia limbs to mitigate impact and actuators capable of carrying the required payload. The design of such limbs poses challenges in integrating optimal kinematic structures with practical design considerations. In the search for optimal design parameters, the advantages of optimization algorithms can be applied. This paper introduces an open-source computational framework for optimizing the topology and parameters of closed linkage mechanisms, addressing the need for task-specific robotic limbs. Closed-loop structures are motivated by 2 main purposes: (1) to decrease robotic limb inertia caused by actuators' relocation next to the robot's body, and (2) to redistribute power among the group of actuators. The framework leverages joint-based spatial graph representations, kinetostatic criteria, and multi-objective genetic algorithms to optimize mechanism topology and geometric parameters. It prioritizes task-aware configurations, including asymmetric designs that surpass symmetric parallel architectures. By focusing solely on kinetostatic criteria, such as Jacobian-based metrics and inertia properties, the framework enables to manage trade-offs in development linkage mechanisms for robots. We demonstrate the framework ability to generate and optimize linkages structure for different scenarios in the task of searching for the 2-degree-of-freedom planar robotic legs
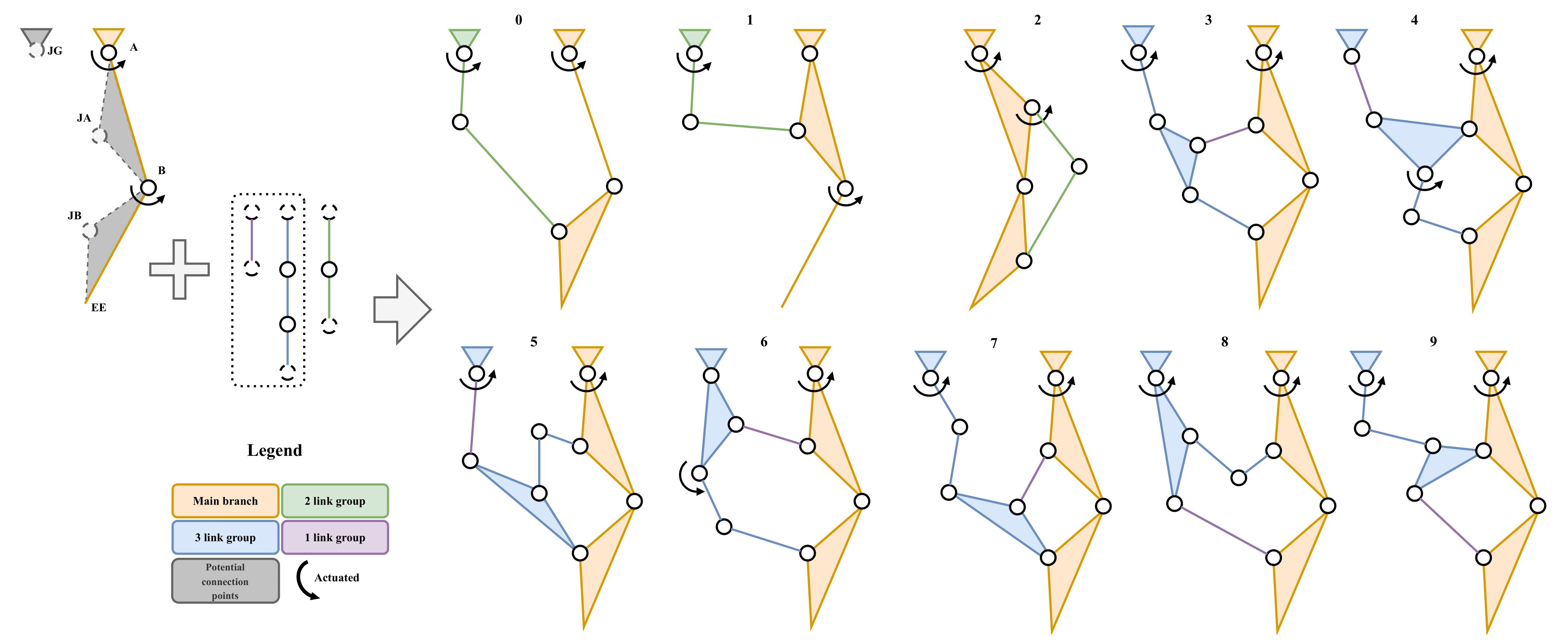
Topologies created by generator from two-link main group with three connection points and secondary groups with up to three connections. The generator produces 10 connection variants and the analysis module selects topologies 0, 3, 7, 9 that move actuators closer to body without redundancy.
@article{TODO,
author = {Mikhail E. Chaikovskii, Yefim V. Osipov-Sigachev, Kirill D. Zharkov,
Ivan I. Borisov, and Sergey A. Kolyubin},
title = {Jmoves: Computational design, closed kinematic chain, robotic limbs},
journal = {IROS},
year = {2025},
}